ติดตามเราบนโซเชียลมีเดียเพื่อรับข่าวสารทันที
ในยุคแห่งความก้าวหน้าทางเทคโนโลยีอย่างก้าวกระโดด ระบบนำทางได้ถือกำเนิดขึ้นเป็นเสาหลักสำคัญที่ขับเคลื่อนความก้าวหน้ามากมาย โดยเฉพาะอย่างยิ่งในภาคส่วนที่ต้องการความแม่นยำสูง การเดินทางจากระบบนำทางด้วยดวงดาวแบบดั้งเดิมไปสู่ระบบนำทางเฉื่อย (Inertial Navigation System: INS) ที่ซับซ้อน สะท้อนให้เห็นถึงความพยายามอย่างไม่หยุดยั้งของมนุษยชาติในการสำรวจและแสวงหาความแม่นยำสูงสุด การวิเคราะห์นี้จะเจาะลึกเข้าไปในกลไกที่ซับซ้อนของ INS โดยสำรวจเทคโนโลยีล้ำสมัยของไจโรสโคปใยแก้วนำแสง (Fiber Optic Gyroscopes: FOGs) และบทบาทสำคัญของโพลาไรเซชันในการรักษาวงจรใยแก้วนำแสง
ส่วนที่ 1: การถอดรหัสระบบนำทางเฉื่อย (INS):
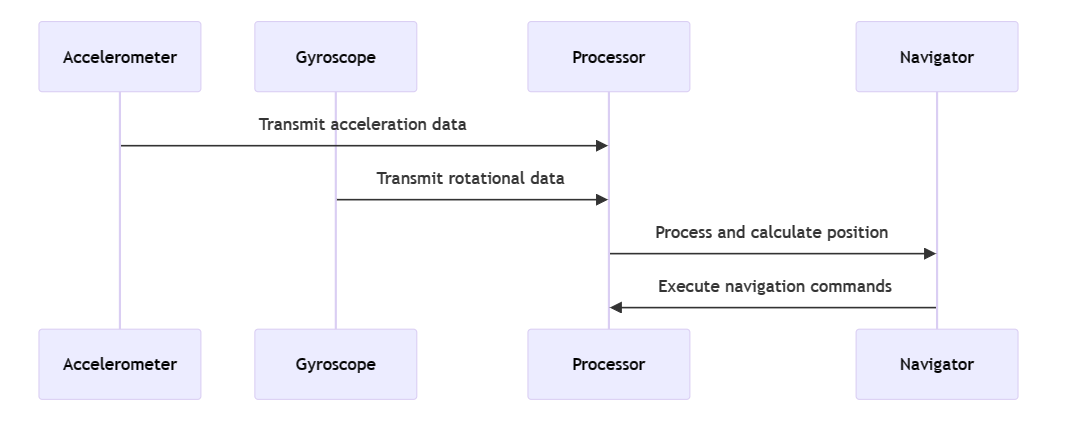
ระบบนำทางด้วยแรงเฉื่อย (INS) โดดเด่นในฐานะระบบช่วยนำทางอัตโนมัติ ที่คำนวณตำแหน่ง ทิศทาง และความเร็วของยานพาหนะได้อย่างแม่นยำ โดยไม่ขึ้นอยู่กับสัญญาณภายนอก ระบบเหล่านี้ประสานการทำงานของเซ็นเซอร์ตรวจจับการเคลื่อนไหวและการหมุน เข้ากับแบบจำลองการคำนวณเพื่อกำหนดความเร็ว ตำแหน่ง และทิศทางเริ่มต้นได้อย่างราบรื่น
ระบบ INS ต้นแบบประกอบด้วยองค์ประกอบหลักสามประการ:
• เซ็นเซอร์วัดความเร่ง: องค์ประกอบสำคัญเหล่านี้จะบันทึกความเร่งเชิงเส้นของยานพาหนะ และแปลงการเคลื่อนที่ให้เป็นข้อมูลที่สามารถวัดได้
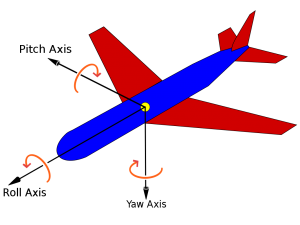
• ไจโรสโคป: ส่วนประกอบสำคัญในการกำหนดความเร็วเชิงมุม และเป็นสิ่งสำคัญอย่างยิ่งต่อการกำหนดทิศทางของระบบ
• โมดูลคอมพิวเตอร์: ศูนย์กลางการทำงานของระบบ INS ทำหน้าที่ประมวลผลข้อมูลหลากหลายด้านเพื่อให้ได้ข้อมูลวิเคราะห์ตำแหน่งแบบเรียลไทม์
ความสามารถในการต้านทานการรบกวนจากภายนอกของระบบ INS ทำให้มันเป็นสิ่งจำเป็นอย่างยิ่งในภาคการป้องกันประเทศ อย่างไรก็ตาม ระบบนี้ประสบปัญหาเรื่อง 'การคลาดเคลื่อน' ซึ่งเป็นการลดลงของความแม่นยำอย่างค่อยเป็นค่อยไป จึงจำเป็นต้องใช้โซลูชันที่ซับซ้อน เช่น การรวมข้อมูลจากเซ็นเซอร์หลายตัวเพื่อลดข้อผิดพลาด (Chatfield, 1997)
ส่วนที่ 2. พลศาสตร์การทำงานของไจโรสโคปใยแก้วนำแสง:
ไจโรสโคปใยแก้วนำแสง (FOGs) เป็นสัญญาณบ่งบอกถึงยุคแห่งการเปลี่ยนแปลงครั้งสำคัญในด้านการตรวจจับการหมุน โดยใช้ประโยชน์จากการแทรกสอดของแสง ด้วยความแม่นยำเป็นหัวใจสำคัญ FOGs จึงมีความสำคัญอย่างยิ่งต่อการรักษาเสถียรภาพและการนำทางของยานอวกาศ
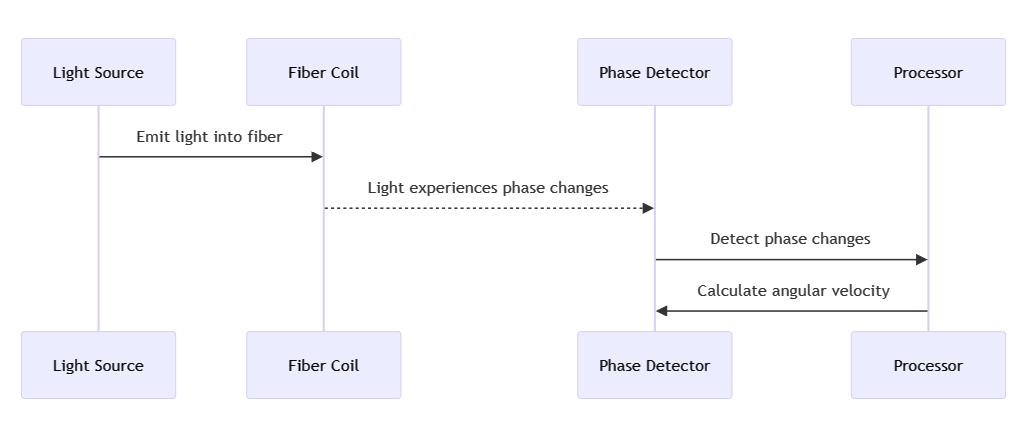
FOG ทำงานโดยอาศัยปรากฏการณ์ Sagnac ซึ่งแสงที่เคลื่อนที่ในทิศทางตรงกันข้ามภายในขดลวดไฟเบอร์ที่หมุนอยู่ จะทำให้เกิดการเปลี่ยนแปลงเฟสที่สัมพันธ์กับการเปลี่ยนแปลงอัตราการหมุน กลไกที่ซับซ้อนนี้สามารถแปลงเป็นค่าความเร็วเชิงมุมที่แม่นยำได้
ส่วนประกอบที่สำคัญได้แก่:
• แหล่งกำเนิดแสง: จุดเริ่มต้น ซึ่งโดยทั่วไปคือเลเซอร์ ทำหน้าที่เริ่มต้นการเดินทางของแสงที่สอดคล้องกัน
· ขดลวดไฟเบอร์ท่อนำแสงแบบขดช่วยยืดเส้นทางการเดินทางของแสง ทำให้ขยายปรากฏการณ์ Sagnac ให้มากขึ้น
• ตัวตรวจจับแสง: ส่วนประกอบนี้ทำหน้าที่แยกแยะรูปแบบการแทรกสอดที่ซับซ้อนของแสง
ส่วนที่ 3: ความสำคัญของการรักษาขั้วของวงจรไฟเบอร์:
วงจรใยแก้วนำแสงแบบรักษาโพลาไรเซชัน (PM) ซึ่งเป็นสิ่งสำคัญสำหรับ FOG ช่วยให้มั่นใจได้ว่าสถานะโพลาไรเซชันของแสงมีความสม่ำเสมอ ซึ่งเป็นปัจจัยสำคัญในการกำหนดความแม่นยำของรูปแบบการแทรกสอด ใยแก้วนำแสงชนิดพิเศษเหล่านี้ช่วยต่อต้านการกระจายตัวของโหมดโพลาไรเซชัน เสริมความไวของ FOG และความถูกต้องของข้อมูล (Kersey, 1996)
การเลือกใช้เส้นใย PM ซึ่งถูกกำหนดโดยความจำเป็นในการปฏิบัติงาน คุณสมบัติทางกายภาพ และความสอดคล้องของระบบ มีผลต่อตัวชี้วัดประสิทธิภาพโดยรวม
ส่วนที่ 4: การประยุกต์ใช้และหลักฐานเชิงประจักษ์:
FOG และ INS มีการใช้งานที่หลากหลาย ตั้งแต่การควบคุมการบินของอากาศยานไร้คนขับ ไปจนถึงการสร้างเสถียรภาพในการถ่ายทำภาพยนตร์ท่ามกลางสภาพแวดล้อมที่ไม่แน่นอน หลักฐานยืนยันถึงความน่าเชื่อถือของระบบเหล่านี้คือการนำไปใช้ในยานสำรวจดาวอังคารของ NASA ซึ่งช่วยให้การนำทางนอกโลกเป็นไปอย่างปลอดภัย (Maimone, Cheng, and Matthies, 2007)
แนวโน้มตลาดคาดการณ์ถึงตลาดเฉพาะกลุ่มที่กำลังเติบโตสำหรับเทคโนโลยีเหล่านี้ โดยทิศทางการวิจัยมุ่งเน้นไปที่การเสริมสร้างความยืดหยุ่นของระบบ เมทริกซ์ความแม่นยำ และสเปกตรัมการปรับตัว (MarketsandMarkets, 2020)

ไจโรสโคปเลเซอร์แบบวงแหวน
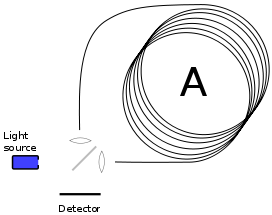
แผนผังแสดงการทำงานของไจโรสโคปใยแก้วนำแสงโดยอาศัยปรากฏการณ์ซาญัก
เอกสารอ้างอิง:
- แชทฟิลด์, AB, 1997หลักการพื้นฐานของการนำทางด้วยระบบเฉื่อยที่มีความแม่นยำสูงความก้าวหน้าในด้านการบินและอวกาศ เล่มที่ 174 เรสตัน รัฐเวอร์จิเนีย: สถาบันการบินและอวกาศแห่งอเมริกา
- Kersey, AD และคณะ, 1996. "ไจโรสโคปใยแก้วนำแสง: 20 ปีแห่งความก้าวหน้าทางเทคโนโลยี" ในรายงานการประชุมของ IEEE84(12), หน้า 1830-1834.
- Maimone, MW, Cheng, Y. และ Matthies, L., 2007. "การวัดระยะทางด้วยภาพบนยานสำรวจดาวอังคาร - เครื่องมือเพื่อรับประกันการขับขี่ที่แม่นยำและการถ่ายภาพทางวิทยาศาสตร์"นิตยสาร IEEE Robotics & Automation14(2), หน้า 54-62.
- MarketsandMarkets, 2020. "ตลาดระบบนำทางด้วยแรงเฉื่อยจำแนกตามระดับ เทคโนโลยี การใช้งาน ส่วนประกอบ และภูมิภาค - การคาดการณ์ระดับโลกถึงปี 2025"
ข้อสงวนสิทธิ์:
- เราขอประกาศว่าภาพบางส่วนที่แสดงบนเว็บไซต์ของเรานั้น รวบรวมมาจากอินเทอร์เน็ตและวิกิพีเดีย เพื่อวัตถุประสงค์ในการส่งเสริมการศึกษาและแบ่งปันข้อมูล เราเคารพสิทธิ์ในทรัพย์สินทางปัญญาของผู้สร้างสรรค์ดั้งเดิมทุกท่าน ภาพเหล่านี้ถูกนำมาใช้โดยไม่มีเจตนาแสวงหาผลกำไรทางการค้า
- หากคุณเชื่อว่าเนื้อหาใดๆ ที่ใช้ละเมิดลิขสิทธิ์ของคุณ โปรดติดต่อเรา เรายินดีที่จะดำเนินการที่เหมาะสม รวมถึงการลบภาพหรือการให้เครดิตอย่างถูกต้อง เพื่อให้เป็นไปตามกฎหมายและข้อบังคับด้านทรัพย์สินทางปัญญา เป้าหมายของเราคือการรักษาแพลตฟอร์มที่มีเนื้อหาคุณภาพสูง เป็นธรรม และเคารพสิทธิ์ในทรัพย์สินทางปัญญาของผู้อื่น
- กรุณาติดต่อเราผ่านช่องทางการติดต่อต่อไปนี้email: sales@lumispot.cnเรามุ่งมั่นที่จะดำเนินการทันทีเมื่อได้รับการแจ้งเตือนใด ๆ และรับประกันความร่วมมืออย่างเต็มที่ในการแก้ไขปัญหาดังกล่าว
วันที่โพสต์: 18 ตุลาคม 2566